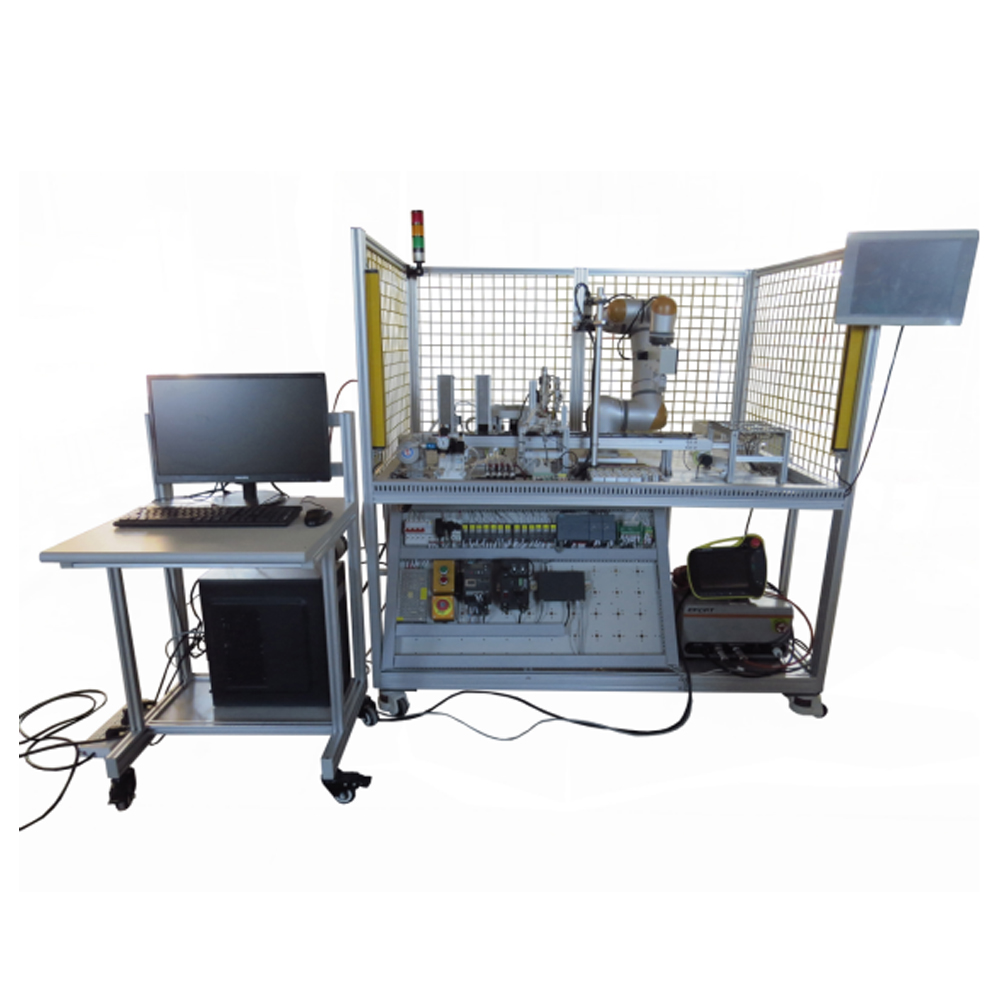
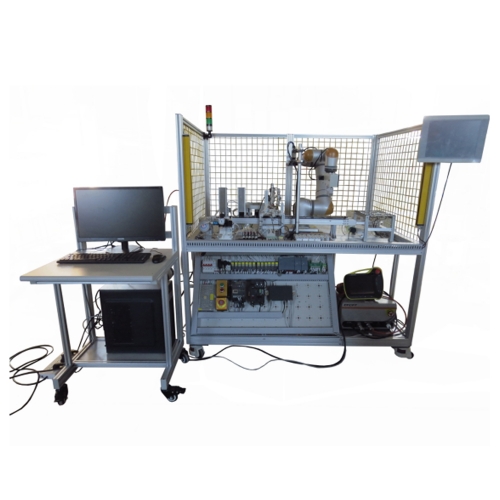
Kollaborativer 6-Achs-Roboterarm mit Kamera und Greifer Berufsausbildungsausrüstung Mechatronik-Ausbildungsausrüstung
punkt nr.: AFM012R
Kollaborativer 6-Achs-Roboterarm mit Kamera und Greifer Berufsausbildungsausrüstung Mechatronik-Ausbildungsausrüstung