RT 060 Trainingssystem Position Control, HSI Didaktikgeräte Berufsbildungsgeräte Prozessregler Trainer
Grundlagen der Regelungstechnik am Beispiel einer Positionsregelung mit integralem Verhalten
Features
- grundlegende regelungstechnische Zusammenhänge am Beispiel einer Positionsregelstrecke
- konfigurierbarer und parametrierbarer Softwareregler mit umfangreichen Funktionen
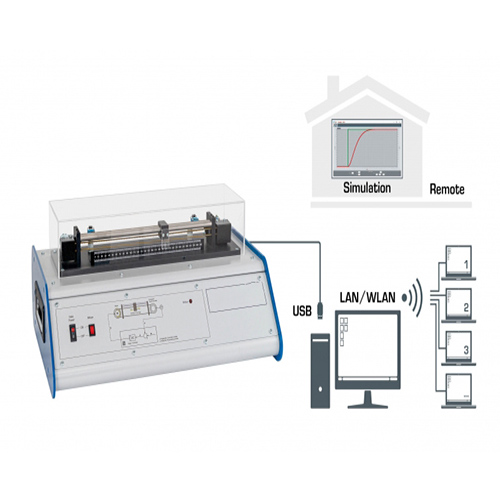
- Versuchsvorbereitung und Softwaresimulation für Remote Learning
- Versuche im lokalen Netzwerk mitverfolgen und analysieren
Lernziele/Versuche
- Grundlagen der Regelungstechnik am Beispiel einer Positionsregelstrecke
- offenes Regelverhalten
- Regelstrecke ohne Rückkopplung
- Auswirkungen unterschiedlicher Reglerparameter und -methoden auf das Regelverhalten
- Regleroptimierung durch Veränderung der Reglerparameter: Kp, Tn, Tv
- Aufzeichnung von Sprungantworten: Stellgrößensprung und Führungsgrößensprung
- Stellgrößenbegrenzung und Auswirkung auf die Regelung
- Softwaresimulation unterschiedlicher Regelstrecken (P, I, PT1, PT2)
- Vergleich unterschiedlicher Regelstreckenparameter
- spezifische Software für die gesamte Geräteserie
- Regler: manuell, ungeregelt Handbetrieb, stetiger Regler, Zwei- oder Dreipunktregler
- Programmierer für eigene Sollwertverläufe
- Aufzeichnung von Zeitabhängigkeiten
- Remote Learning: Software-Simulation an beliebig vielen Arbeitsplätzen
Spezifikationen
[1] Positionsregelung: typische Regelstrecke
[2] Regelstrecke: beweglicher Schlitten mit Linearführung
[3] Regelgröße: Position des beweglichen Schlittens
[4] Messelement: Drehgeber (Mehrgangpotentiometer) als Positionssensor
[5] Softwareregler konfigurierbar und parametrierbar als P-, PI-, PID- und schaltender Regler
[6] Stellglied: Motor


[7] Stahlmaßstab zur Beobachtung der Position
[8] transparente Schutzabdeckung über dem Versuchsaufbau
[9] 2 Mikroschalter zur Endlagenabschaltung
[10] Software-Simulation: verschiedene Regelstrecken
[11] Software: Möglichkeit zum Anschluss beliebig vieler externer Arbeitsplätze im lokalen Netzwerk zur Verfolgung und Analyse des Versuchs
[12] Versuchsvorbereitung und Software-Simulation an beliebig vielen Arbeitsplätzen für Remote Learning
[13] Software mit Regelfunktionen und Datenerfassung über USB unter Windows 10
[14] Multimediale Lehrmaterialien online im Media Center
Technische Daten
Motor
- Betriebsspannung: 12VDC
- Übersetzung: i=50
- Drehzahl: 85min-1
- Drehmoment: 200Nmm
Drehgeber: Mehrgangpotentiometer
max. Verfahrgeschwindigkeit: 45mm/s
Stahlmaßstab: 0...300mm
Softwareregler konfigurierbar und parametrierbar als P-, PI-, PID- und Schaltregler
Messbereiche
- Verfahrweg: max. 300mm
230V, 50Hz, 1 Phase
230V, 60Hz, 1 Phase
120V, 60Hz, 1 Phase
UL/CSA optional
LxBxH: 600x450x280mm
Gewicht: ca. 20kg